|

�@�q���ʐM�ɂ́A�Î~�q�����g�p����V�X�e���Ƃ��āA�Œ�n�_�Ԃ̒ʐM���s���Œ�q���ʐM�y�ёD���A�q��@���A�ړ��̂Ƃ̊Ԃ̒ʐM���s���ړ��q���ʐM��2������܂��B
�@�܂��A��Î~�q���ʐM�V�X�e���ɂ́A�Î~�q���V�X�e���Ɠ��l�ɌŒ�ʐM�y�шړ��̒ʐM������܂��B
���@�j
| ���a32�N10���i1957�j |
�X�v�[�g�j�N�P���ł��グ�i�\�A�j |
| ���a37�N�@�@�i1962�j |
�e���X�^�[�P��(�č�) |
| ���a39�N�@�@�i1964�j |
�V���R���R���i�Î~�q���A�č��j |
| ���a52�N�@�@�i1977�j |
�C�ۉq���A�����p�ʐM�q���ł��グ |
| ���a53�N�@�@�i1978�j |
�����p�����q���ł��グ |
| �������N 6���i1989�j |
JC-SAT�ł��グ |
| ���� 4�N12���i1992�j |
�X�[�p�[�o�[�hA�ł��グ |
| ���� 7�N 8���i1995�j |
N-SAT�ł��グ |
| ����12�N10���i2000�j |
N-STAR�|110���ł��グ
�X�[�p�[�o�[�hD���@�ł��グ |
|
�i1�j���ݎg�p����Ă����ȓ��{�̒ʐM�q���ƕ����q��
| �@ |
�i�q�����̌�̐����͐Î~�o�x�i���o�j��\���B�܂��A�}���̊e�q���̌o�x�p�́A���m�Ȋp�x�ɍ�}����Ă��Ȃ��B�j |
�@�@
�@�@�A�@�ʐM�q��
| ���� |
N-STAR��
(NTT) |
J-SAT2A |
�X�[�p�[
�o�[�hB2 |
�C���e��
�T�b�g9�� |
�C���}��
�T�b�g(3F3) |
| �Î~�o�x |
136��E |
154��E |
162��E |
62��E |
178��E
64.5��E |
| �`�� |
3���^ |
3���^ |
3���^ |
3���^ |
3���^ |
| �d�� |
2,000kg |
1,460kg |
2,500kg |
4,726kg |
1,380kg |
| ���z�d�r�o�� |
5kW |
3.6kW |
5.7kW |
7kW |
2.3kW |
| �q������ |
10�N |
11�N |
13�N |
13�N |
�i�s���j |
���p�@��
���g���т�
�i�䐔�j |
Ka�@(11)
Ku�i8�j
C�@�i6�j
S�@�i1�j |
Ku�i16�j
C�@�i16�j |
Ku�i23�j
Ka�@�i6�j |
C�@�i44�j
Ku�@�i12�j |
L
1000ch |
|
�@�@�C�@�����q��
| ���� |
BSAT�|110 |
N�|SAT�|110
�i�����j |
JCSAT�|3
������� |
SUPERBIRD�|C
�������
|
| �Î~�o�x |
110��E |
110��E |
128��E |
144��E |
| �`�� |
�X�s�� |
3���^ |
3���^ |
3���^ |
| �d�� |
720kg |
2,100kg |
1,800kg |
1,500kg |
| ���z�d�r�o�� |
980W |
7.2kW |
5.2kW |
4.3kW |
| �q������ |
10�N |
15�N |
12�N |
13�N |
���p�@��
���g���т�
�i�䐔�j |
Ku�i4�j |
Ku�i32�j |
Ku�@(28)
C�@(12) |
Ku�@(24) |
| �o�� |
106W |
120W |
75W |
90W |
|
�@�@�E�@�q���ʐM�̓���
�@�@�@�@�E �T�[�r�X�G���A���ł͑����̒n�_�ʼn�����ݒ�ł���(�L�搫�E�_�)�B
�@�@�@�@�E �ЊQ���Ƀl�b�g���[�N�̊m�ۂ��e�Ղł���i�ύЊQ���j�B
�@�@�@�@�E ��e�ʂ̏�`���ł���i��e�ʐ��j�B
�i2�j�q���ʐM���Ǝ҂Ə��L����q��
�@�@�@���{�d�M�d�b�������(N-SAT)�@�i�C��ɂ����鉈�ݖ����d�b�̓W���R�[�i�Q�Ɓj
�@�A�@(��)���{�T�e���C�g�V�X�e���Y(JCSAT)
�@�B�@�F���ʐM(��)�i�X�[�p�[�o�[�h�j
|
|
|
|
JCSAT�S���q��
|
�X�[�p�[�o�[�hA2��
|
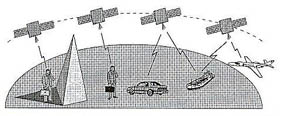
�@���@�ړ�����n����
 |
�ʐ^�́A�ʐM�q���̒[��(�ړ��n����)�ł��B |
| �@ |
 |
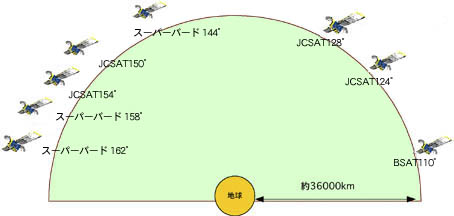
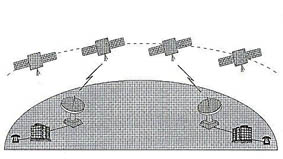
�i3�j�Î~�q���̃V�X�e���T�v
�@�Î~�q���ʐM�́A�ԓ����3��6��km�̐Î~�O����ɑł��グ��ꂽ�l�H�q���𗘗p���čs���ʐM�ł��B�Î~�q���́A���]�������n���̎��]����23����56��4�b�ɓ������A�O���X�Ίp��0�x�̉~�O����ɂ��邽�߁A�n�ォ�猩�ĐÎ~������Ԃɂ���̂ŁA�ʐM������ɗ��p����̂ɕ֗��ł��B
�@
|
�A |
�@�Œ�n�_�ԒʐM�ɗp������Î~�q���Ƃ��ẮAN�|STAR�AJC�|SAT�A�X�[�p�[�o�[�h�A�C���e���T�b�g�q����������܂��B |
| �@ |
�@ |
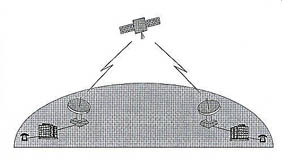
�Œ�n�_�Ԃ����ԒʐM�V�X�e�� |
| �@ |
�C |
�@�Î~�q���𗘗p�����ړ��ʐM�ɂ́AN�|STAR�A�C���}���T�b�g��������܂��B |
| �@ |
�@ |
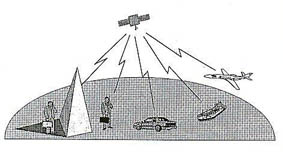
�ړ��Ǒ��݊Ԃ����ԒʐM�V�X�e�� |
�i4�j����q��
�@�@�@����q���́A�Î~�O���ȊO�̋O�������q���ł��B�@
| �@ |
�A |
�@�Œ�ʐM�ɗp���������q���Ƃ��ẮA�e���f�V�b�N�q��������܂��B |
| �@ |
�@ |
����q���𗘗p�����Œ�n�_�ԒʐM |
�@
| �@ |
�C |
�@�ړ��ʐM�ɗp���������q���Ƃ��ẮA�C���W���E���A�I�f�b�Z�C�A�O���[�o���X�^�[�AICO�A�I�[�u�R����������܂��B |
| �@ |
�@ |
����q���𗘗p�����ړ��ʐM |
�i5�j�l�H�q���̌`��y�ё�\��
| |
�X�s����������q��(BSAT-1a�A1b�A�Ђ܂��)
�@�l�H�q���̖{�̂��R�}�̂悤�ɉ�]�����邱�Ƃɂ���ĉq���̎p�������肳��������̈��������B
�@���̕����́A�M���x�̍��������ł����A���z�d�r�̖ʐς�傫���o���Ȃ����߁A���ʂ̓d�͂������Ȃ���_������܂��B |
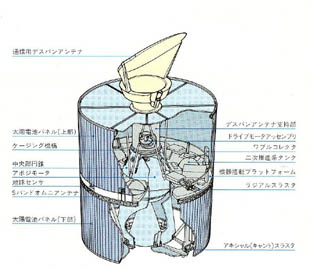
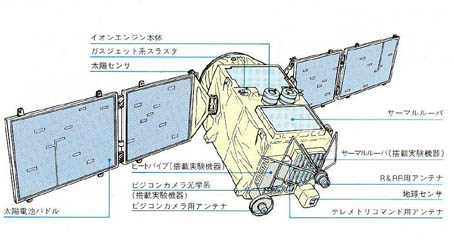
�O���p������q���iN-STAR�AJCSAT�A�X�[�p�[�o�[�h�A�C���e���T�b�g�A�C���}���T�b�g���j
�@�l�H�q���̎O��(�c�A���A�����̕���)���ꂼ��̎p���덷���v������p���Z���T�[��W���C����ݒu���A�p���̗���ɉ����ăK�X�W�F�b�g���r�I���^�̃z�C�[���ȂǂŎp���𐧌�E���肳��������ł��B
�@���z�d�r�̃p�l����傫���ł��A�傫�ȓd�͂邱�Ƃ��\�ł��B
|